Metaprior Adaptation - Supplementary Materials
This page shows some examples of robot behavior and internal variables for different meta-prior values during a testing (error regression) episode. For both disk-tracking and the cube-manipulation experiments we show:
- A meta-prior that is too small, resulting on un-stable behavior that overfits to the sensory noise
- A meta-prior that is too large, resulting on poor adaptation to the sensory evidence
- A meta-prior that has been adapted using the pseudo-online method described in the paper, achieving an optimal balance of sensory adaptation while being robust to sensory noise.
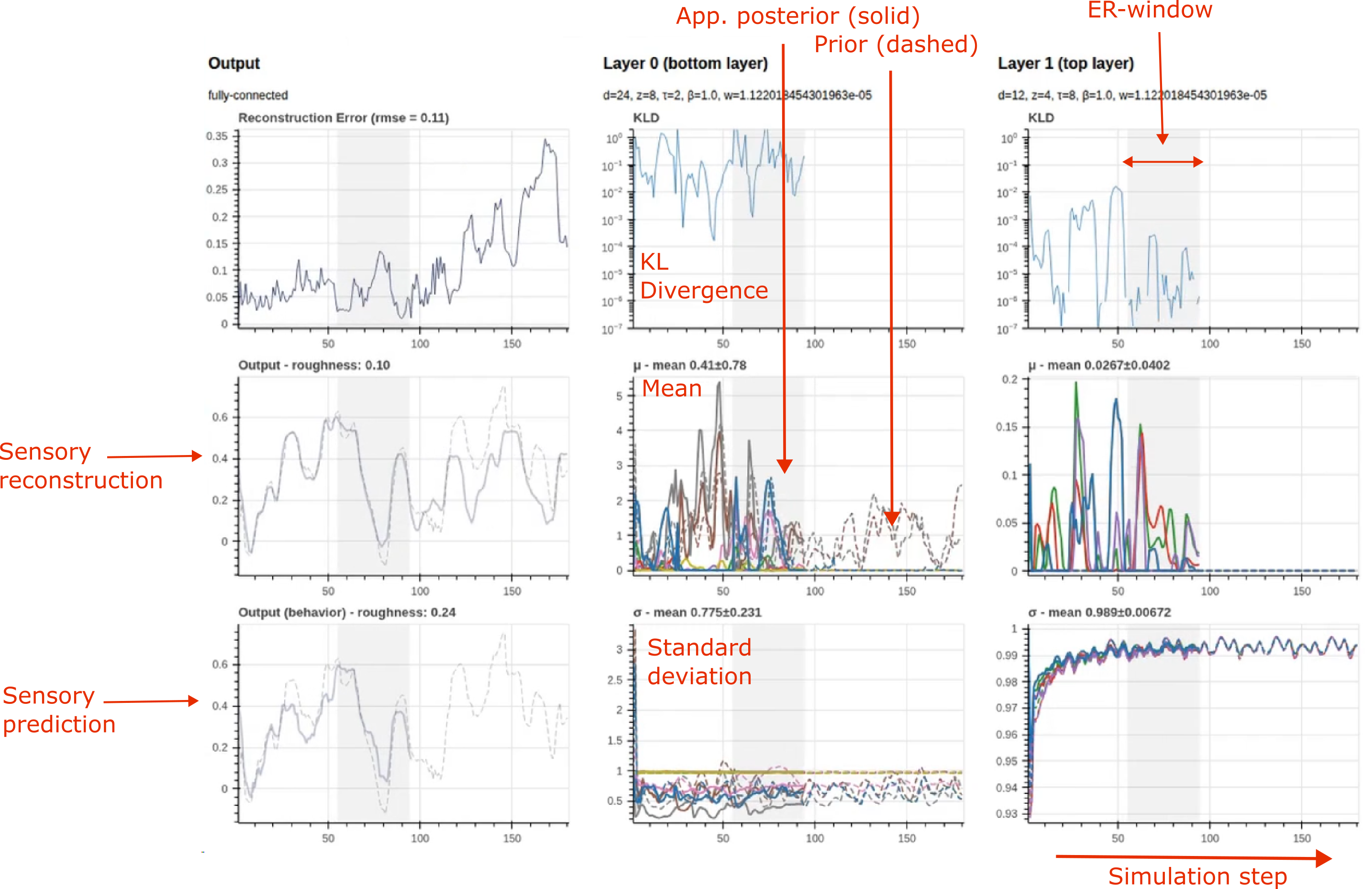
The internal variables show sensory prediction and reconstruction, as well as the hidden probabilistic latent variable mean and standard deviation for both prior and approximate posterior, in both layers of the network. Here is what the panels in the videos represent:
Disk-tracking experiment
In this experiment the robot has to follow a disk that switches unexpectedly between two regions of a table. The training data has a strong bias towards the right side, while in the shown example the disk has equal probability to switch to each side. Sensory noise has a signal/noise ratio of 0.5.
Metaprior too small
Adapted metaprior
Metaprior too large
Cube manipulation experiment
In this experiment the robot has to lift and place a cube on random positions on top of a table. At test time, we randomly perturb the cube a fixed distance every time the robot places it on the table. Sensory noise has a signal/noise ratio of 0.5.
Metaprior too small
Adapted metaprior
Metaprior too large